
A Ford megháromszorozza a teljesen automatizált Ford Fusion Hybrid kísérleti járművekből álló flottáját – jelenleg egyik autógyártónak sincs ekkora ilyen jellegű autó flottája – és az önjáró autók fejlesztésének felgyorsítása jegyében egy új generációs szenzoros technológiát is alkalmaz majd.
A Ford idén 20 darab Fusion Hybrid önállóan működő járművel növeli önjáró autókból álló flottáját, így összesen 30 önjáró autót tesztelhetnek majd Kalifornia, Arizona és Michigan államban.

”A legfejlettebb technológiát alkalmazzuk, és gyarapítjuk a tesztflottánkat is, hogy az önjáró autókat emberek milliói számára juttathassuk majd el,” nyilatkozta Raj Nair, a globális fejlesztés csoportszintű alelnöke, a vállalat technológiai igazgatója. ”A nagyobb önjáró flotta segítségével felgyorsítjuk az autókat még intelligensebbé varázsoló szoftveralgoritmusok fejlesztését.”
A Ford több mint tíz éve foglalkozik az önállóan működő járművekkel; ez a bővítés kulcsfontosságú része lesz a Ford Intelligens Mobilitás programnak, melynek célja új szintre emelni az összeköttetést, a mobilitást, az önjáró autókat, a felhasználói élményt és az adatelemzést. A legújabb modellek a Ford automatizált autóinak harmadik generációjához tartoznak, amelyek – a második generációhoz hasonlóan – a négyajtós Fusion Hybrid modellekre épülnek.
A Ford nemrég jelentette be, hogy a teljesen automatizált járművek idén jelennek meg Kalifornia közútjain. A vállalat már a saját tesztpályáján és Michiganben is teszteli az autókat. A Ford a világon elsőként tesztelt önjáró autókat az Mcity-ben, a Michigan Egyetem városi forgalmat szimuláló, közel 32 focipálya méretű területén.
Fejlesztések az érzékelők, a szoftverek és a hardverek területén
Harmadik generációs önjáró autóinál a Ford a Velodyne vállalat új, Solid-State Hybrid Ultra PUCK™ Auto nevű LiDAR szenzorát használja, amely egy jégkorong méretű és formájú érzékelő.
A Solid-State Hybrid Ultra PUCK Auto szenzorok hatótávolsága 200 méterre bővült, így ezek az első, autókra fejlesztett LiDAR szenzorok, amelyek több forgalmi helyzetet is képesek kezelni. Az Ultra Puck felgyorsítja majd a Ford virtuális vezetési szoftverének fejlesztését és engedélyeztetését, amely egyfajta döntéshozó agyként irányítja a jármű elektronikáját.
Könnyű, praktikus kialakítása miatt a Solid-State Hybrid Ultra PUCK Auto optimálisan elhelyezhető az autókban, akár a külső visszapillantó tükrökön is. Az új dizájn lehetőséget nyújt arra, hogy a korábbi négy helyett mindössze két LiDAR szenzort szereljenek be a Fusion Hybrid önjáró autóba, ám ezek a célzottabb látótér miatt ugyanannyi hasznos információt gyűjtenek be.
”A legmodernebb számítógépek és szenzorok – mint a kisebb és kedvezőbb árú Solid-State Hybrid Ultra PUCK Auto – segítenek a Fordnak abban, hogy minél hamarabb forgalomba állítsa a teljesen automatizált járműveket,” mondta el Jim McBride, a Ford önjáró autókkal foglalkozó technológiai vezetője.
Legalább ilyen fontos az autók hardveres rendszere, amely folyamatos kapcsolatban áll a virtuális vezetővel.
A harmadik generációs Fusion Hybrid önjáró változatában dupla huzalozást kapnak a hajtóművek, a kormányrendszer és a fékek is. A megkettőzött vezetékezés szükség esetén biztonságos támogatást nyújt.
A Ford önjáró kalandja
A Ford bő egy évtizede, a Fejlett Védelmi Kutatási Projektek (DARPA) ügynökségének önjáró autókra kiírt pályázata óta használja a Velodyne LiDAR szenzorait.
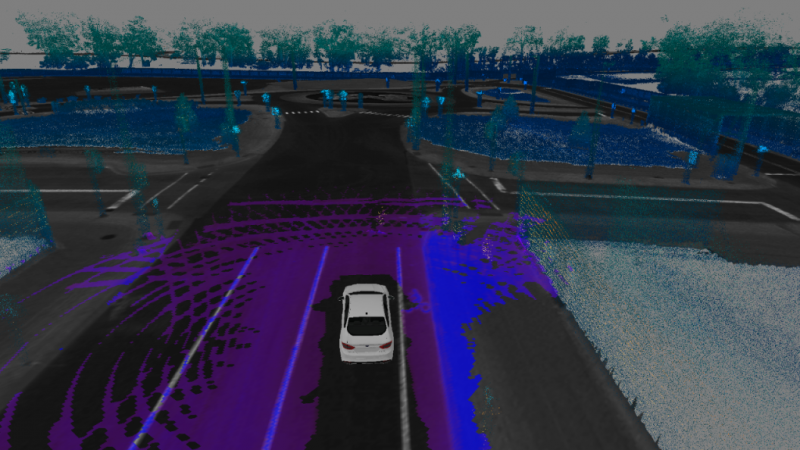
A Ford az elsők között alkalmazta a Velodyne LiDAR érzékelőket, amelyek alapjaiban változtatták meg az önjáró autók piacát. A LiDAR másodpercenként több millió lézeres energiaimpulzust bocsát ki magából, hogy felmérje a környezetet, és megbecsülje az egyes tárgyak távolságát. Az önjáró autók így valós idejű, nagy felbontású háromdimenziós képet alkotnak a környezetükről.
A Ford első generációs önjáró autóplatformjához a Ford F-250 Super Duty modellt használták fel, s a vállalat ezzel vett részt a DARPA 2005-ös és 2007-es projektjében. A Ford 2013-ban mutatta a második generációs platformot, amely már a Fusion Hybrid modellre épült.
A Ford egyike volt annak a mindössze hat csapatnak, amelyek a DARPA Sivatagi és Városi kihívásában is részt vettek. A vállalatot ebben négy olyan mérnök segítette, akik ma is a Ford önjáró autó fejlesztési részlegének tagjai.
”Sokat fejlődtünk a DARPA óta,” vélekedett McBride. ”Tíz éve még senki nem tudta, mi lehet a technológia jövője. Ma már gőzerővel dolgozunk azon, hogy a legmerészebb álmainkat is valóra váltsuk.”
Az önjáró autók első generációjának segítségével a Ford megértette, hogy a teljes automatizáltság már a közeljövőben kivitelezhető technológiailag, a folyamatos kutatások során pedig az is kiderült, hogyan.
A második generációhoz azért a Fusion Hybrid modelleket választották ki, mert ezek az autók rendelkeznek a legújabb és legfejlettebb elektronikával. A vadonatúj számítógépes és érzékelős technológiákkal – mint a kisebb, de intelligensebb Velodyne LiDAR HDL-32E szenzor – a Ford egy újabb lépéssel közelebb került ahhoz, hogy forgalomba állítsa az önjáró autókat.
A második generációs flotta célja minél több számítógépes és szenzoros alkatrész tesztelése volt, amelyek a SAE szervezet nemzetközi listájának 4-es szintje szerint a teljesen automatizált vezetéshez szükségesek, vagyis olyan autók irányításához, amelyekben a sofőrnek nem kell beavatkoznia vagy átvennie a jármű irányítását.
Tavaly nyáron a Ford a fejlesztés kutatási szakaszából a továbbfejlesztett mérnöki szakaszba lépett.
A Ford mindeközben egyéb szenzorokat is fejleszt (kamerákat, radart és ultrahangos eszközöket) hogy a mai vásárlókat fejlett félautomata megoldásokkal kényeztesse. Ezek között található az Adaptív Sebességtartó Automatika, a Parkolássegítő rendszer, a Sávelhagyásra Figyelmeztető Rendszer, a Sávtartó Asszisztens, a gyalogosérzékelő rendszer, a Pro Trailer Backup Assist utánfutórendszere és a járművek közti kapcsolat technológiája, amelyek több millió Ford modellben megtalálhatók ma is.




























